Introducció
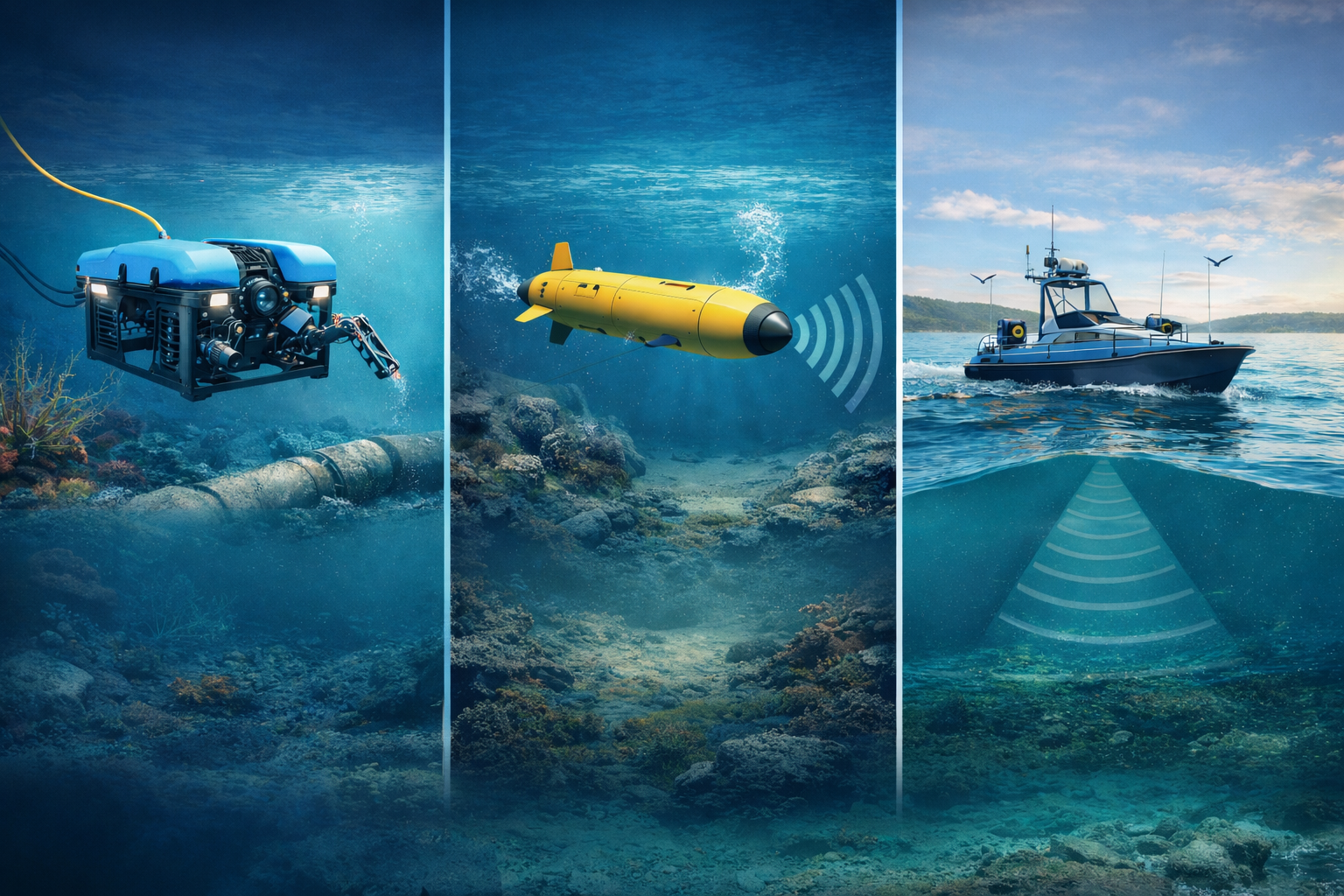
La robòtica marina i subaquàtica es basa en una combinació de tecnologies de navegació, detecció i mesura. Tant si es tracta de pilotar un ROV (Vehicle operat remotament), A USV (Vehicle de superfície no tripulat) o dur a terme una campanya batimetria, Els sensors són essencials. Tanmateix, entre els acrònims (DVL, USBL, GNSS RTK…) i la diversitat de solucions disponibles, és fàcil perdre's.
Aquest glossari us ajuda a comprendre els principals sensors submarins i la seva funció, per tal de guiar millor les vostres decisions tecnològiques.
DVL – Registre de velocitat Doppler
Definició
A DVL (Registre de Velocitat Doppler) mesura la velocitat d'un vehicle submarí respecte al fons marí mitjançant l'efecte Doppler.
Ús
- Navegació de precisió sense GPS.
- Estimació de la posició relativa (Dead Reckoning).
- Mantenir una trajectòria estable per a un ROV.
Exemple concret
EL/LA/ELS/LES Impact Subsea DVL A50 està dissenyat per a vehicles lleugers com el BlueROV2. Compacte i potent, permet una navegació submarina fiable fins a 200 m de profunditat.
Sónar
Definició
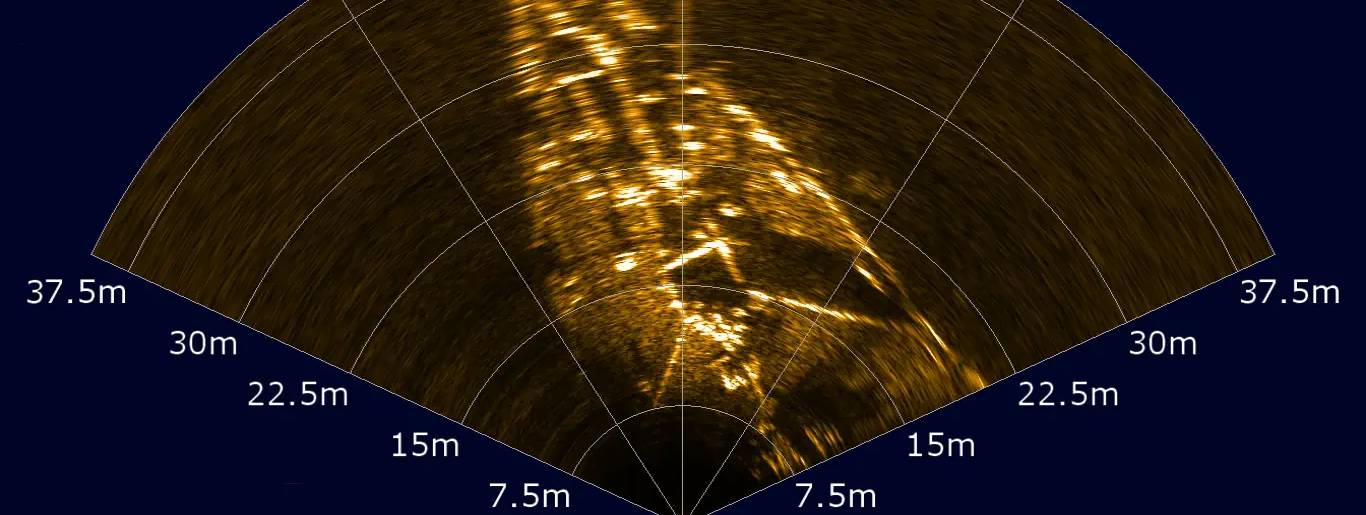
EL/LA/ELS/LES sonar (navegació i mesurament de distància sonora) utilitza ones sonores per detectar i visualitzar l'entorn submarí.
Tipus principals
- Sonar d'escaneig lateral : cartografia del fons marí i recerca de naufragis.
- Sonar multifeix batimetria i cartografia 3D d'alta resolució.
- Sonar omnidireccional : observació en temps real de les estructures i els entorns portuaris.
Exemple concret
A Cerulean Omniview 450 Muntat en ROV, permet una vigilància portuària eficaç fins i tot en aigües tèrboles.
GNSS RTK – Cinemàtica en temps real
Definició
EL/LA/ELS/LES GNSS RTK (Sistema Global de Navegació per Satèl·lit – Cinemàtica en Temps Real) proporciona una posició a nivell centimètric en temps real mitjançant un senyal diferencial.
Ús
- Posicionament en superfície (USV, BlueBoat).
- Estudis batimètrics d'alta precisió.
- Sincronització amb un sonar multifeix.
Exemple concret
A BlueBoat equipat amb GNSS RTK esdevé una plataforma ideal per a la batimetria en ports i rius.
USBL – Línia de base ultracurta
Definició
A USBL (línia de base ultracurta) és un sistema de localització acústica que mesura la posició d'un transponedor submarí des d'un vaixell o un dron de superfície.
Ús
- Seguiment en temps real d'un ROV.
- Operacions a alta mar per a inspecció i elevació.
- Localització d'objectius o equips submergits.
Exemple concret
EL/LA/ELS/LES USBL G2 connectat a l'aigua es pot integrar en un USV o ROV per proporcionar un seguiment fiable, fins i tot en aigües profundes.
Altímetre i ecosonda
Definició
A altímetre mesura la distància entre un vehicle i el fons marí o una estructura. ecosonda mesura la profunditat de l'aigua per sota d'un punt determinat.
Ús
- Mantenir una altitud constant.
- Prevenció de col·lisions amb el fons.
- Adquisició de dades batimètriques simples.
Exemple concret
L'’Impacte submarí ISA500 combina un altímetre d'alta precisió, una ecosonda i un AHRS en un únic sensor compacte.
Sensors ambientals
A més dels sensors de navegació, nombrosos instruments mesuren l'estat del medi marí:
- CTD (Conductivitat – Temperatura – Profunditat) : utilitzat en oceanografia per caracteritzar l'aigua.
- Sensor d'oxigen dissolt : monitorització de la qualitat de l'aigua en aqüicultura i recerca científica.
- Sensor de terbolesa : control de la claredat de l'aigua, essencial per als estudis ambientals.
Exemple concret
A ROV equipat amb un sensor CTD i un sensor d'oxigen s'utilitza per controlar la qualitat de l'aigua en una zona portuària o de preses.
Conclusió
Els sensors subaquàtics són el cor de la robòtica marina: transformen un simple ROV o USV en un plataforma per obtenir dades precises i fiables.
A casa de Expert en ROV, Integrem i distribuïm una àmplia gamma de sensors: DVL, sonars, USBL, GNSS RTK, altímetres, CTD i molts més. Tant si ets un/a laboratori de recerca, empresa offshore o autoritat local, T'ajudem a triar la solució que millor s'adapta a les teves missions.