Introduction
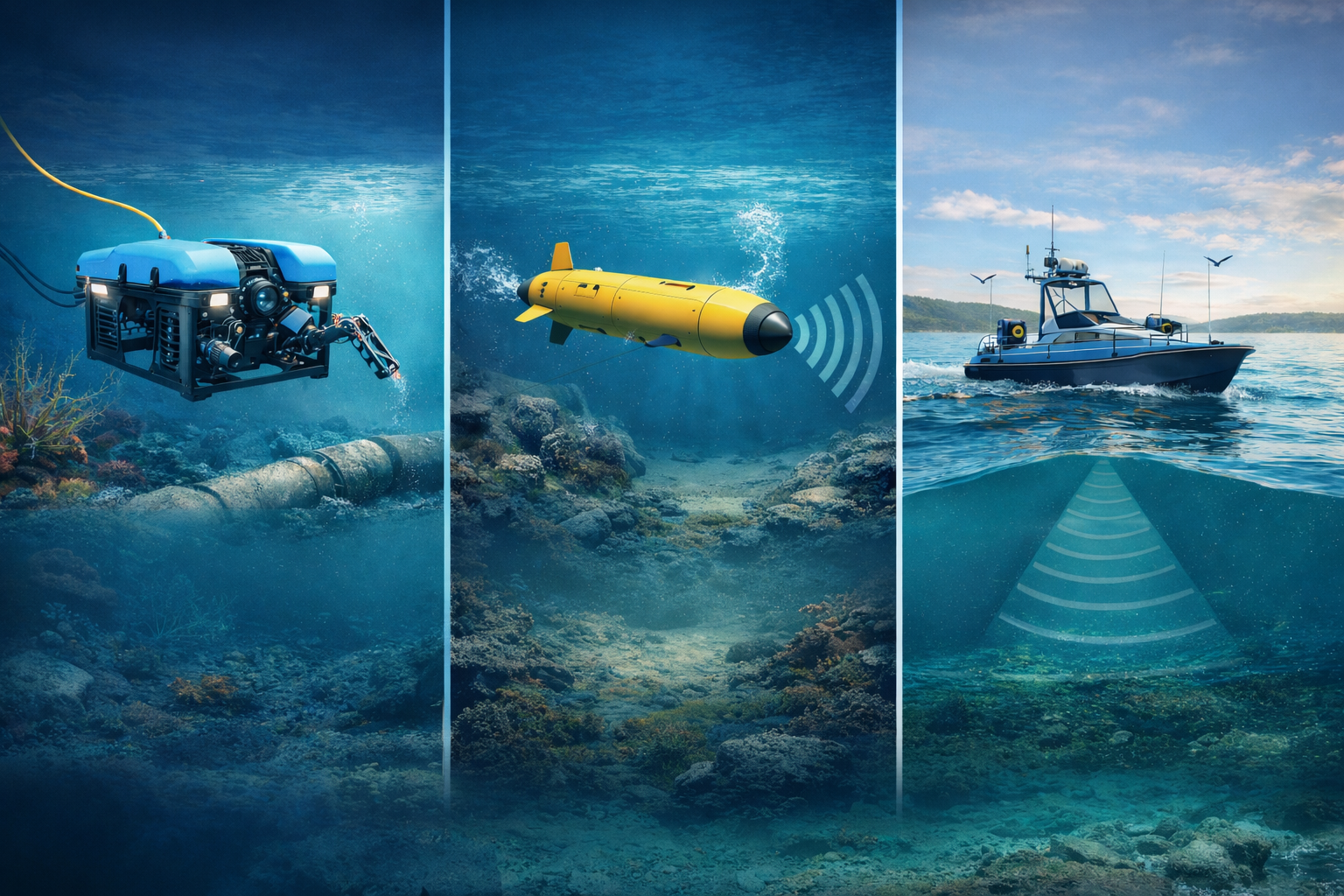
Marine and underwater robotics are based on a combination of navigation, detection and measurement technologies. Whether you're piloting a ROV (Remotely Operated Vehicle), a USV (Unmanned Surface Vehicle) or carry out a bathymetry, sensors are essential. And yet, between the acronyms (DVL, USBL, GNSS RTK...) and the diversity of solutions available, it's easy to get lost.
This glossary will help you understand the main underwater sensors and their role, so you can make the right technological choices.
DVL - Doppler Velocity Log
Definition
A DVL (Doppler Velocity Log) measures the speed of an underwater vehicle relative to the seabed using the Doppler effect.
Use
- Precision navigation without GPS.
- Relative position estimation (Dead Reckoning).
- Maintaining a stable trajectory for an ROV.
A concrete example
Visit DVL A50 from Impact Subsea is designed for light vehicles like the BlueROV2. Compact and powerful, it enables reliable underwater navigation up to 200 m depth.
Sonar
Definition
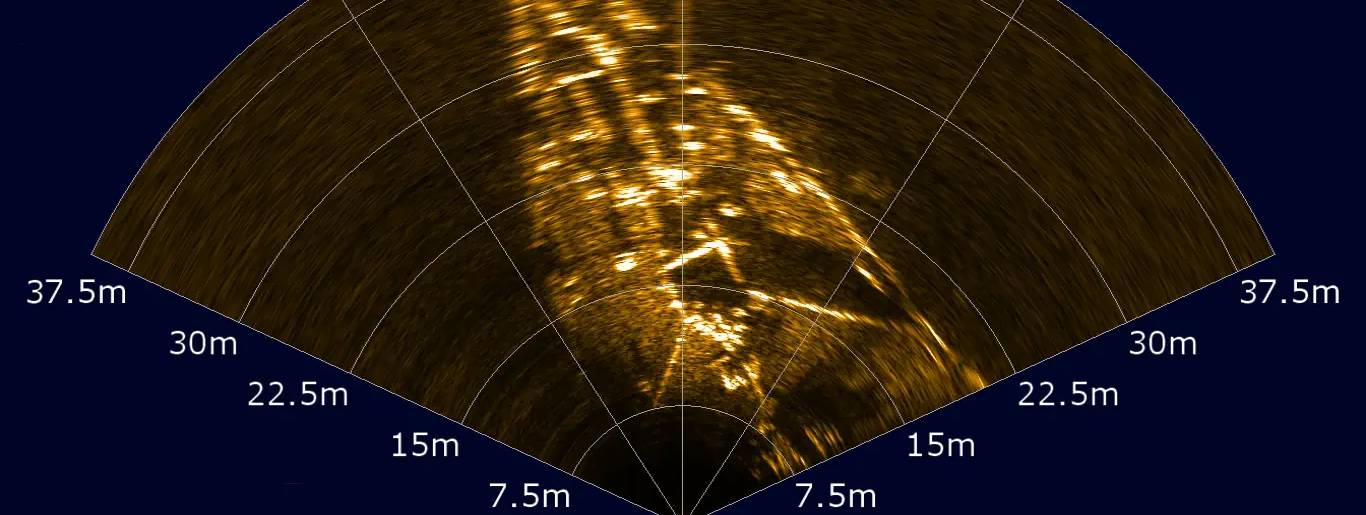
Visit sonar (Sound Navigation And Ranging) uses sound waves to detect and image the underwater environment.
Main types
- Side scan sonar mapping the seabed and searching for shipwrecks.
- Multibeam sonar bathymetry and high-resolution 3D mapping.
- Omnidirectional sonar Real-time observation of port structures and environments.
A concrete example
A Cerulean Omniview 450 mounted on ROVs, enables effective port surveillance even in turbid waters.
GNSS RTK - Real Time Kinematic
Definition
Visit GNSS RTK (Global Navigation Satellite System - Real Time Kinematic) provides a centimetric position in real time thanks to a differential signal.
Use
- Surface positioning (USV, BlueBoat).
- High-precision bathymetric surveys.
- Synchronization with multibeam sonar.
A concrete example
A BlueBoat equipped with RTK GNSS becomes an ideal platform for bathymetry in harbors and rivers.
USBL - Ultra-Short Baseline
Definition
A USBL (Ultra-Short Baseline) is an acoustic locating system that measures the position of an underwater transponder from a ship or surface drone.
Use
- Real-time ROV tracking.
- Offshore operations for inspection and lifting.
- Locating submerged targets or equipment.
A concrete example
Visit Water Linked USBL G2 can be integrated into a USV or ROV to provide reliable tracking, even in deep water.
Altimeter and echo sounder
Definition
A altimeter measures the distance between a vehicle and the seabed or a structure. A echo sounder measures the depth of water below a given point.
Use
- Maintain a constant altitude.
- Prevent collision with the seabed.
- Acquisition of simple bathymetric data.
A concrete example
L’ISA500 d'Impact Subsea combines a high-precision altimeter, echo sounder and AHRS in a single compact sensor.
Environmental sensors
In addition to navigation sensors, many other instruments measure the state of the marine environment:
- CTD (Conductivity - Temperature - Depth) used in oceanography to characterize water.
- Dissolved oxygen sensor monitoring water quality in aquaculture and scientific research.
- Turbidity sensor water clarity control, essential for environmental studies.
A concrete example
A ROV equipped with CTD sensor and oxygen sensor is used to monitor water quality in a port or dam area.
Conclusion
Underwater sensors are at the heart of marine robotics: they transform a simple ROV or USV into a fully-fledged robot. precise, reliable data acquisition platform.
At ROV Expert, We integrate and distribute a wide range of sensors: DVL, sonar, USBL, GNSS RTK, altimeters, CTD and many others. Whether you're a research laboratory, offshore company or local authority, We'll help you choose the solution best suited to your needs.