Introducción
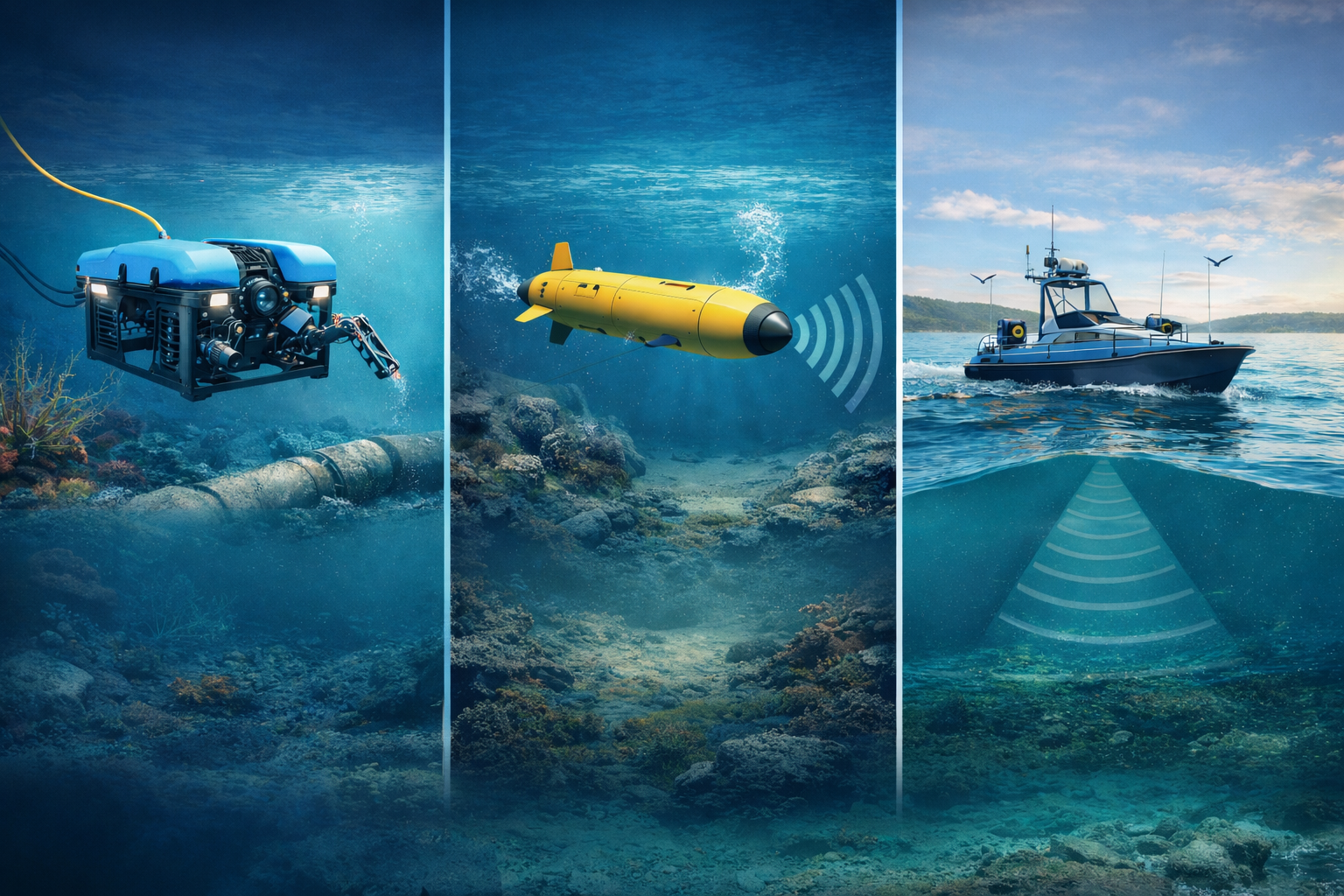
La robótica marina y submarina se basa en una combinación de tecnologías de navegación, detección y medición. Tanto si pilota un ROV (Vehículo teledirigido), a USV (Vehículo de superficie no tripulado) o llevar a cabo una batimetría, Los sensores son esenciales. Pero con todas las siglas (DVL, USBL, GNSS RTK, etc.) y la variedad de soluciones disponibles, es fácil perderse.
Este glosario le ayudará a comprender los principales sensores subacuáticos y su función, para que pueda tomar mejores decisiones tecnológicas.
DVL - Registro de velocidad Doppler
Definición
A DVL (Registro de velocidad Doppler) mide la velocidad de un vehículo submarino en relación con el fondo marino mediante el efecto Doppler.
Utilice
- Navegación de precisión sin GPS.
- Estimación de la posición relativa (Dead Reckoning).
- Mantener una trayectoria estable para un ROV.
Un ejemplo concreto
Le DVL A50 de Impact Subsea está diseñado para vehículos ligeros como el BlueROV2. Compacto y potente, proporciona una navegación submarina fiable hasta 200 m de profundidad.
Sónar
Definición
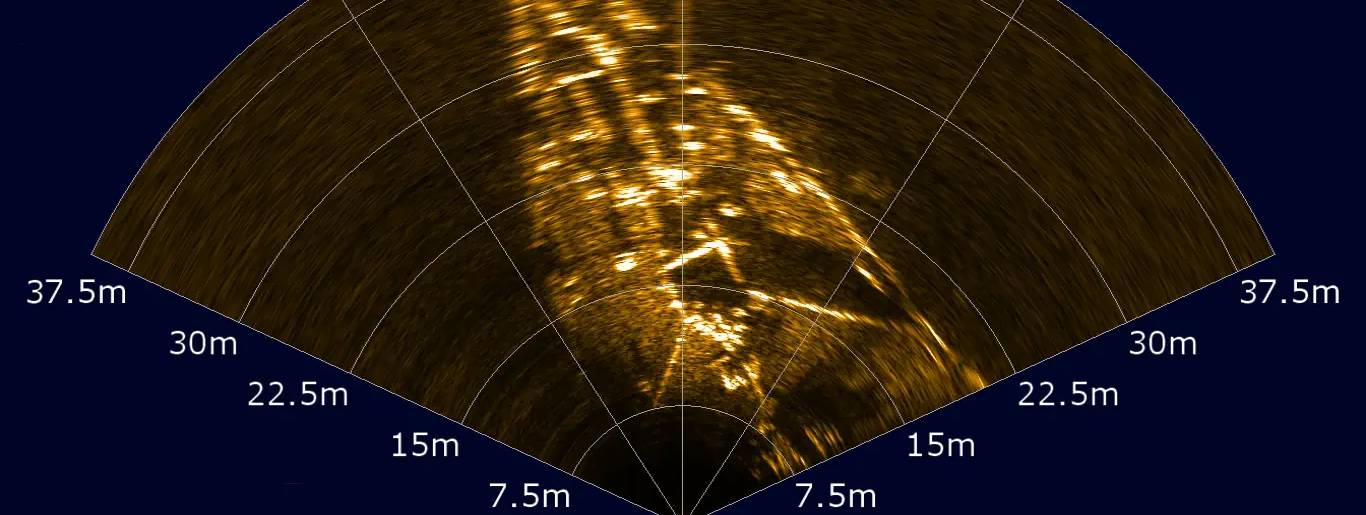
Le sonar (Sound Navigation And Ranging) utiliza las ondas sonoras para detectar y obtener imágenes del entorno submarino.
Principales tipos
- Sonar de barrido lateral cartografiar el fondo marino y buscar pecios.
- Sonar multihaz batimetría y cartografía 3D de alta resolución.
- Sonar omnidireccional Observación en tiempo real de estructuras y entornos portuarios.
Un ejemplo concreto
A Cerulean Omniview 450 montado en ROV permite una vigilancia portuaria eficaz incluso en aguas turbias.
GNSS RTK - Cinemática en tiempo real
Definición
Le GNSS RTK (Sistema Mundial de Navegación por Satélite - Cinemática en tiempo real) proporciona una posición centimétrica en tiempo real mediante una señal diferencial.
Utilice
- Posicionamiento en superficie (USV, BlueBoat).
- Levantamientos batimétricos de alta precisión.
- Sincronización con sonar multihaz.
Un ejemplo concreto
A BlueBoat equipado con RTK GNSS la convierte en una plataforma ideal para la batimetría en puertos y ríos.
USBL - Línea de base ultracorta
Definición
A USBL (línea de base ultracorta) es un sistema de localización acústica que mide la posición de un transpondedor submarino desde un barco o un dron de superficie.
Utilice
- Monitorización en tiempo real de un ROV.
- Operaciones en alta mar para inspección y elevación.
- Localización de objetivos o equipos sumergidos.
Un ejemplo concreto
Le Enlace de agua USBL G2 puede integrarse en un USV o ROV para proporcionar un seguimiento fiable, incluso en aguas profundas.
Altímetro y ecosonda
Definición
A altímetro mide la distancia entre un vehículo y el fondo marino o una estructura. A ecosonda mide la profundidad del agua por debajo de un punto determinado.
Utilice
- Mantener una altitud constante.
- Prevención de colisiones con el fondo marino.
- Adquisición de datos batimétricos simples.
Un ejemplo concreto
L’Impacto submarino ISA500 combina altímetro, ecosonda y AHRS de alta precisión en un único sensor compacto.
Sensores ambientales
Además de los sensores de navegación, varios instrumentos miden el estado del medio marino:
- CTD (Conductividad - Temperatura - Profundidad) utilizado en oceanografía para caracterizar el agua.
- Sensor de oxígeno disuelto control de la calidad del agua en la acuicultura y la investigación científica.
- Sensor de turbidez control de la claridad del agua, esencial para los estudios medioambientales.
Un ejemplo concreto
A ROV equipado con un sensor CTD y un sensor de oxígeno se utiliza para controlar la calidad del agua en una zona portuaria o de presas.
Conclusión
Los sensores submarinos están en el corazón de la robótica marina: transforman un simple ROV o USV en un sistema robótico completo. plataforma de adquisición de datos precisa y fiable.
En Experto en ROV, Integramos y distribuimos una amplia gama de sensores: DVL, sonar, USBL, GNSS RTK, altímetros, CTD y muchos otros. Tanto si eres un laboratorio de investigación, sociedad offshore o autoridad local, Podemos ayudarle a elegir la solución que mejor se adapte a sus necesidades.