Introdução
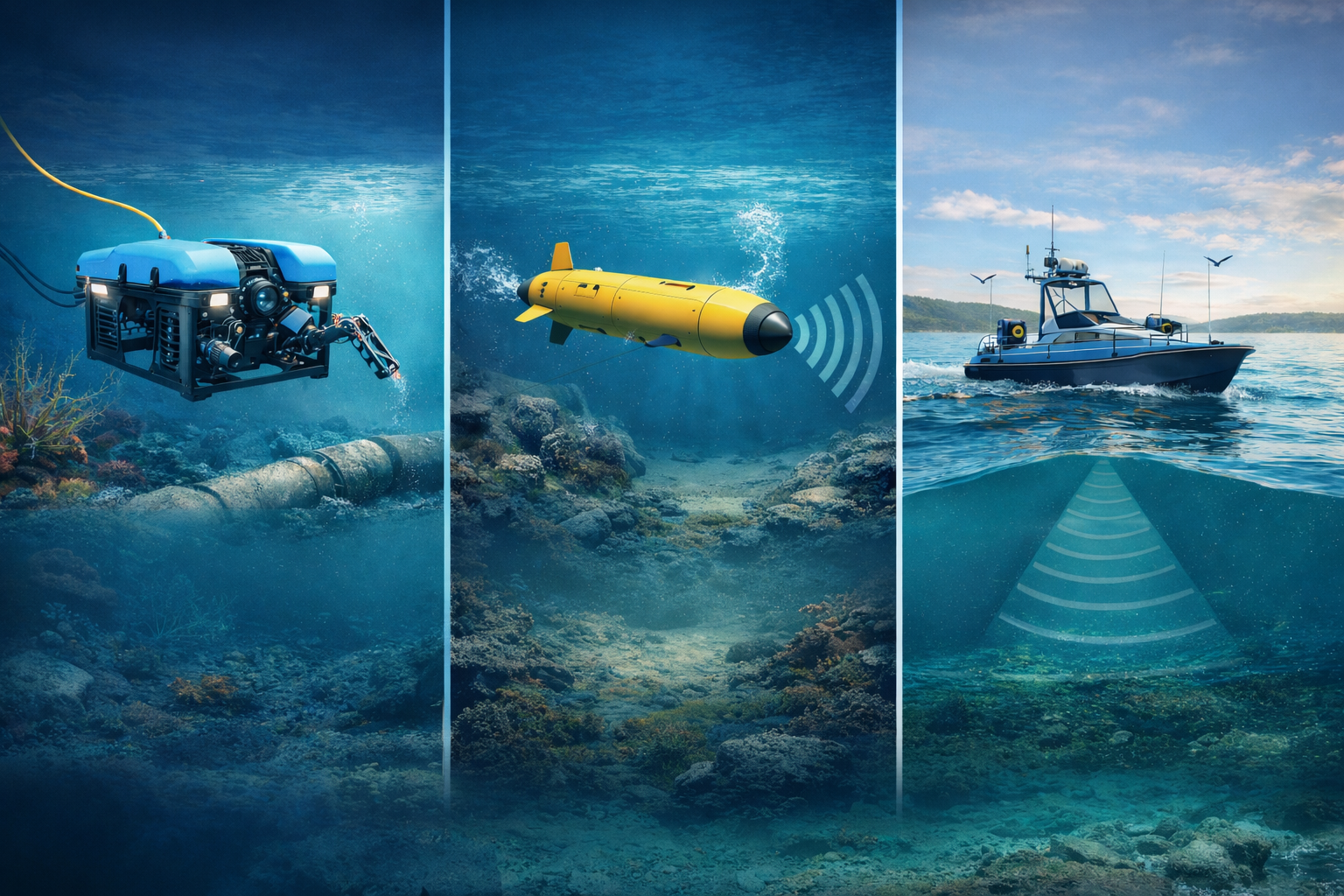
A robótica marinha e subaquática baseia-se numa combinação de tecnologias de navegação, deteção e medição. Quer esteja a pilotar um ROV (Veículo Operado Remotamente), a USV (Veículo de superfície não tripulado) ou efetuar uma batimetria, Os sensores são essenciais. Mas com todos os acrónimos (DVL, USBL, GNSS RTK, etc.) e a variedade de soluções disponíveis, é fácil perder-se.
Este glossário ajudá-lo-á a compreender os principais sensores subaquáticos e a sua função, para que possa fazer melhores escolhas tecnológicas.
DVL - Registo de Velocidade Doppler
Definição
A DVL (Registo de Velocidade Doppler) mede a velocidade de um veículo subaquático em relação ao fundo do mar utilizando o efeito Doppler.
Utilização
- Navegação de precisão sem GPS.
- Estimativa da posição relativa (cálculo morto).
- Manutenção de uma trajetória estável para um ROV.
Um exemplo concreto
Le DVL A50 da Impact Subsea foi concebido para veículos ligeiros como o BlueROV2. Compacto e potente, proporciona uma navegação subaquática fiável até 200 m de profundidade.
Sonar
Definição
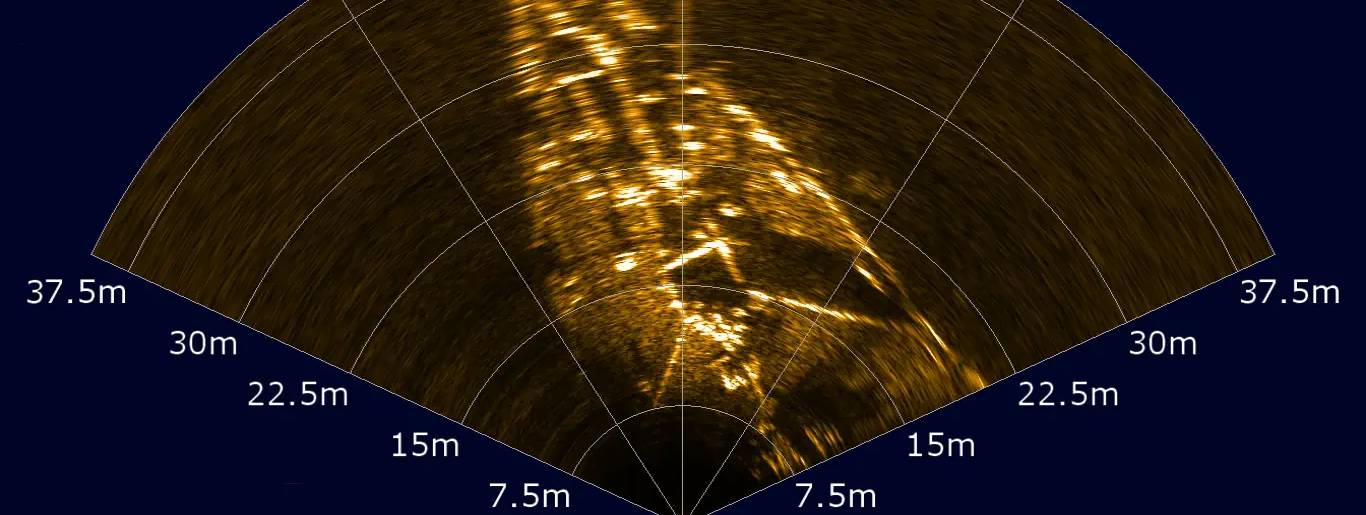
Le sonar (Sound Navigation And Ranging) utiliza ondas sonoras para detetar e obter imagens do ambiente subaquático.
Principais tipos
- Sonar de varrimento lateral mapeamento do fundo do mar e procura de navios naufragados.
- Sonar multifeixe batimetria e cartografia 3D de alta resolução.
- Sonar omnidirecional Observação em tempo real de estruturas e ambientes portuários.
Um exemplo concreto
A Cerulean Omniview 450 montado em ROVs permite uma vigilância eficaz do porto, mesmo em águas turvas.
GNSS RTK - Cinemática em tempo real
Definição
Le GNSS RTK (Sistema Global de Navegação por Satélite - Cinemática em Tempo Real) fornece uma posição centimétrica em tempo real utilizando um sinal diferencial.
Utilização
- Posicionamento à superfície (USV, BlueBoat).
- Levantamentos batimétricos de alta precisão.
- Sincronização com sonar multifeixe.
Um exemplo concreto
A BlueBoat equipado com RTK GNSS torna-o uma plataforma ideal para batimetria em portos e rios.
USBL - Linha de base ultra-curta
Definição
A USBL (linha de base ultra-curta) é um sistema de localização acústica que mede a posição de um transponder subaquático a partir de um navio ou de um drone de superfície.
Utilização
- Monitorização em tempo real de um ROV.
- Operações offshore de inspeção e elevação.
- Localização de alvos ou equipamentos submersos.
Um exemplo concreto
Le USBL G2 ligado à água pode ser integrado num USV ou ROV para proporcionar um seguimento fiável, mesmo em águas profundas.
Altímetro e ecobatímetro
Definição
A altímetro mede a distância entre um veículo e o fundo do mar ou uma estrutura. A ecobatímetro mede a profundidade da água abaixo de um determinado ponto.
Utilização
- Manter uma altitude constante.
- Prevenir as colisões com o fundo do mar.
- Aquisição de dados batimétricos simples.
Um exemplo concreto
L’Impacto Submarino ISA500 combina um altímetro de alta precisão, um ecobatímetro e um AHRS num único sensor compacto.
Sensores ambientais
Para além dos sensores de navegação, há uma série de instrumentos que medem o estado do ambiente marinho:
- CTD (Condutividade - Temperatura - Profundidade) utilizado em oceanografia para caraterizar a água.
- Sensor de oxigénio dissolvido monitorização da qualidade da água em aquacultura e investigação científica.
- Sensor de turbidez monitorização da limpidez da água, essencial para estudos ambientais.
Um exemplo concreto
A ROV equipado com um sensor CTD e um sensor de oxigénio é utilizado para monitorizar a qualidade da água numa zona portuária ou numa barragem.
Conclusão
Os sensores subaquáticos estão no centro da robótica marinha: transformam um simples ROV ou USV num sistema robótico completo. plataforma de aquisição de dados precisa e fiável.
Em Especialista em ROV, Integramos e distribuímos uma vasta gama de sensores: DVL, sonar, USBL, GNSS RTK, altímetros, CTD e muitos outros. Quer seja um laboratório de investigação, empresa offshore ou autoridade local, Podemos ajudá-lo a escolher a solução mais adequada às suas necessidades.